Use Helmfile for Deployment in Offline Environments
Helmfile is an orchestrator tool for collecting, building, and deploying cloud-native apps. Basically it’s the packager for helm chart based applications.
One of the interesting ideas I came along recently, is utilizing it for working in air-gapped environments, where access to the internet is not feasible.
Use Case
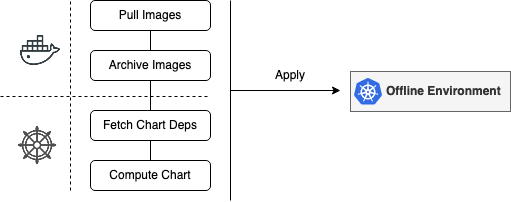
Let’s say you were deploying an application to a Kubernetes cluster. The idea is to package all dependencies and manifests beforehand in a local or control machine, then push the consolidated deployment directory to the offline machine.
The diagram below depicts the flow.
Example Deployment
The script below is a custom version of deploying Dex in offline mode, as an example.
A simplified helmfile would look like this:
# helmfile.yaml
repositories:
- name: dex
url: https://charts.dexidp.io
helmDefaults:
verify: true
wait: true
waitForJobs: true
timeout: 600
releases:
- name: dex
namespace: dex
createNamespace: true
chart: dex/dex
version: 0.11.1
values:
- config:
issuer:
{{ requiredEnv "OIDC_ISSUER" }}
storage:
type: kubernetes
config:
inCluster: true
oauth2:
skipApprovalScreen: true
staticClients: []
connectors: []
- ingress: {}
The following script saves archived version of the chart’s assets inside ./output.
# offline.sh
#!/bin/bash
IMAGE_VERSION=v2.34.0
IMAGE=ghcr.io/dexidp/dex
CHART_REPO=https://charts.dexidp.io
CHART=dex/dex
CHART_VERSION=0.11.1
docker pull ${IMAGE}:${IMAGE_VERSION}
# tagging is optional
docker tag registry.local.lan/${IMAGE}:${IMAGE_VERSION} \
${IMAGE}:${IMAGE_VERSION}
docker save registry.local.lan/{IMAGE}:${IMAGE_VERSION} \
-o ./output/images/{IMAGE}:${IMAGE_VERSION}.tar
helm repo add ${CHART_REPO}
helm pull ${CHART} --version ${CHART_VERSION} --destination ./output/charts/
Then, it should be a matter of executing the following sequence to prepare the final build directory:
$ BUILD_TIME=$(date +%Y-%d-%m-at-%H-%M)
$ ./offline.sh
$ export $(cat .env | xargs)
$ helmfile fetch
$ helmfile build \
> ./output/final-$BUILD_TIME.yml
In case helmfile binary is not available in the target environment, just template plain manifests.
$ helmfile template \
> ./output/final-${BUILD_TIME}.yml
Finally, on the production node you would run something similar to this:
$ docker load -i ./output/*.tar
$ docker push
$ helmfile sync --skip-deps \
-f ./output/final-*.yml
# In case `helm` is not available:
$ kubectl apply -f ./output/final-*.yml
As you can see, this method is extensible and can be generalized for any helm-based deployment. For the complete example listing, refer to the github repo here.
Conclusion
Certain security or compliance challenges imposed in air-gapped environments can make it hard to deliver cloud native deployments. Luckily, several CNCF projects (harbor, rancher, k3s, to name few) provide options to tackle such environments. Additionally, the presented approach above is generic for any helm application to be deployed properly in offline mode.